
![]()
Para Inglés o Español:
Para japonés:
Clientes de Mexíco:
Servicio Al Cliente - +001-847-871-5931
Soporte técnico - 800-681-5309
Clientes Internacionales:
+1-847-871-5931 o
+1-310-715-3304
Para soporte en productos del catálogo japonés:
1-800-746-6872 o
+1-310-715-3304


















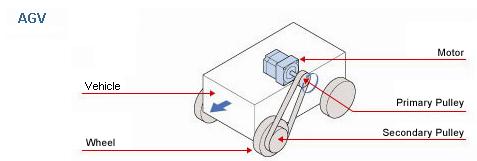
Vehículos de guiado automático (AGV, por sus siglas en inglés)
The following is the estimated requirements. Please contact 1-800-468-3982 ( from overseas 1-847-871-5931 ) for assistance or questions.
To print the calculation report, click
Full Report
To view the motor selection tips, click
Tips
 Imprimir
Imprimir![]()
Horas de trabajo:
de lunes a viernes
8:30 a.m. EST a 5:00 p.m. PST
Soporte técnico:
+1-800-681-5309