
![]()
Para Inglés o Español:
Para japonés:
Clientes de Mexíco:
Servicio Al Cliente - +001-847-871-5931
Soporte técnico - 800-681-5309
Clientes Internacionales:
+1-847-871-5931 o
+1-310-715-3304
Para soporte en productos del catálogo japonés:
1-800-746-6872 o
+1-310-715-3304


















Kazuya SHIRAHATA
Oriental Motor Co., Ltd. ofrece una amplia variedad de motores de control de velocidad. Nuestros paquetes de motores de control de velocidad incluyen el motor, el excitador (controlador) y un potenciómetro que permite ajustar fácilmente el control de velocidad. Nuestros motores de control de velocidad se dividen en tres grupos de productos. Los "motores de control de velocidad de CA" que emplean el motor de inducción accionado por capacitor monofásico más popular, los compactos y altamente eficientes "motores sin escobillas de CC" y los "inversores" que combinan un motor de inducción trifásico con un inversor pequeño. Este artículo explica la estructura, el principio de control de velocidad y las características de cada grupo de productos. Además, presenta nuestros productos estándar.
1. Introducción
En nuestro entorno se usa gran cantidad de motores con fines generales, desde equipos domésticos hasta herramientas en instalaciones industriales. El motor eléctrico se ha convertido en una fuente necesaria e indispensable de alimentación en muchas industrias. La función y el desempeño requeridos para estos motores oscilan grandemente. Si nos concentramos en el segmento de control de velocidad del mercado de los motores, los servomotores y los motores paso a paso controlan su velocidad con un tren de impulsos, mientras que los motores de inducción y los motores sin escobillas de CC controlan la velocidad con una resistencia externa y/o tensión de CC.
Este artículo explica la estructura, el principio de control de velocidad y las características de los siguientes tres grupos de productos que pueden controlar la velocidad en forma relativamente fácil mediante entradas analógicas.
- Motores de control de velocidad de CA
- Motores sin escobillas de CC
- Inversores
2. Métodos de control de velocidad de los diversos motores de control de velocidad
El método de control de la salida de un circuito de control de velocidad puede dividirse en líneas generales en dos grupos: control de fases y control por inversor, que conforman los grupos de productos que se muestran en la Fig. 1.
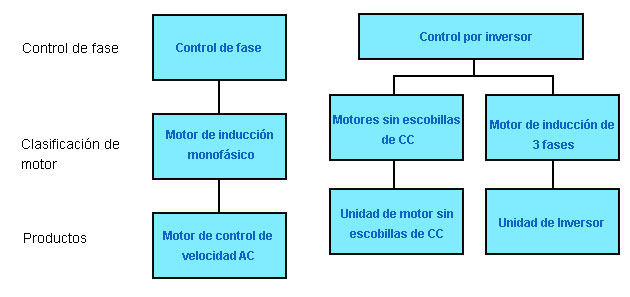
Fig. 1 Clasificación de los motores de control de velocidad
2.1. Motores de control de velocidad de CA
2.1.1. Estructura del motor
Como se muestra en la Fig. 2, la estructura de los motores de inducción monofásicos y trifásicos incluye un estator con un devanado principal y un rotor en fundición de aluminio sólido en forma de canasta. El rotor es de bajo costo porque la estructura es simple y no utiliza imán.
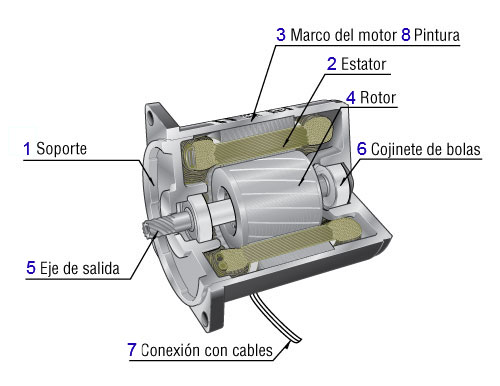
Fig. 2 Estructura de un motor de inducción
Cuando se necesita controlar la velocidad de este motor, se emplea un tacogenerador para detectar la velocidad y se lo acopla al motor como se muestra en la Fig. 3. El tacogenerador está compuesto por imán conectado directamente al eje del motor y una bobina de estator que detecta los polos magnéticos y genera un voltaje de CA de 12 ciclos por revolución. Dado que este voltaje y frecuencia aumentan con la elevación de la velocidad de rotación, la velocidad de rotación del motor se controla en función de esta señal.
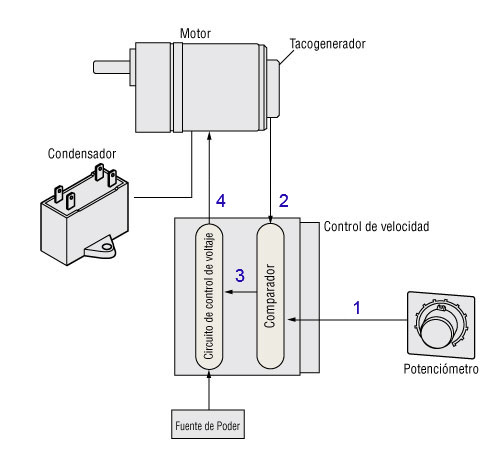
Fig. 3 Sistema de motor de control de velocidad de CA
2.1.2. Principio de control de velocidad
La velocidad de rotación N de un motor de inducción se puede ilustrar con la expresión (1). Cuando se aumenta y se reduce el voltaje que se aplica al motor, el deslizamiento s se modifica y, por consiguiente, la velocidad de rotación N se modifica.
N= 120·f ·(1-s)/P · · · · · · · · · · (1)
N: Velocidad de rotación [rpm]
F: Frecuencia [Hz]
P: Cantidad de polos de un motor
S: Deslizamiento
En el caso de un motor de inducción como el que se muestra en la Fig. 4, existen un rango estable y un rango inestable en la curva de velocidad de rotación/par. Dado que es imposible operar en forma confiable el rango inestable, el control de voltaje simple (control de circuito abierto) se limita a controlar la velocidad en un rango acotado, por ejemplo, N1~N3 en la Fig. 5 Para permitir la operación confiable incluso en el rango inestable antes mencionado, es necesario detectar la velocidad de rotación del motor y usar un mecanismo de control del voltaje (control de circuito cerrado) que reduce el error de velocidad en comparación con un valor fijo.
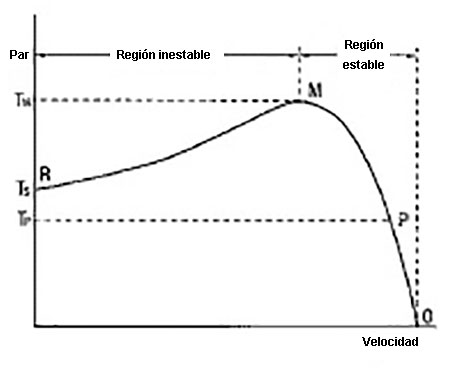
Fig. 4 Características de velocidad de rotación/par de los motores de inducción
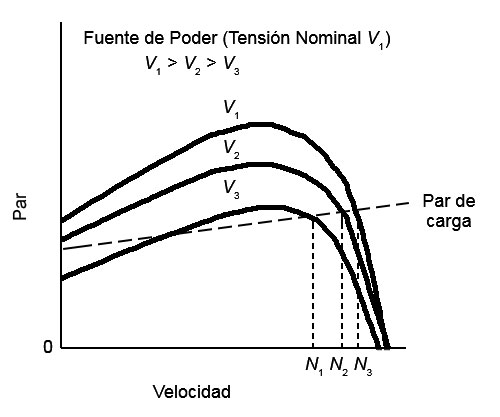
Fig. 5 Control de voltaje simple
Los métodos disponibles de control de voltaje incluyen el control con un transformador o por control de fases. La Fig. 6 muestra cómo se controla el voltaje usando un transformador. Este método no es tan fácil de aplicar en un motor de control de velocidad de CA Alternativamente, el voltaje de CA puede ajustarse mediante el tiempo de actividad/inactividad de cada medio ciclo del voltaje de CA (50 o 60 Hz) aplicado al motor con un elemento de conmutación (tiristor o triac) que puede activar y desactivar directamente el voltaje como se muestra en la Fig. 7 y en la Fig. 8. Con el método de control de fases, el control de velocidad se logra controlando el valor cuadrático medio (rms) del voltaje de CA.
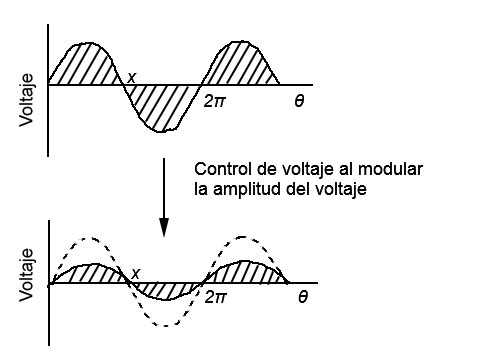
Fig. 6 Cambio de voltaje realizado por transformador
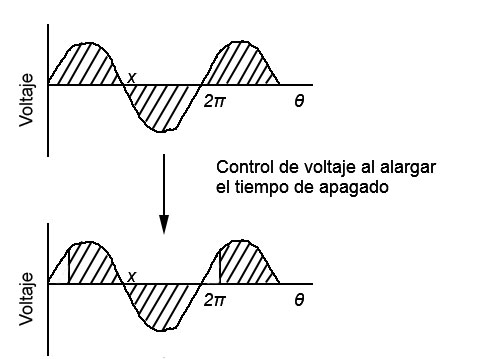
Fig. 7 Cambio de voltaje realizado por control de fases
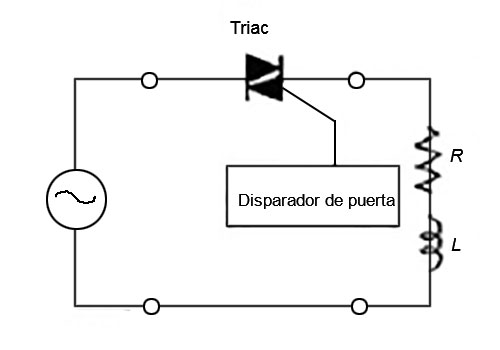
Fig. 8 Circuito de control con triac
Este método de control de velocidad de CA puede ofrecer un control de velocidad estable a través del control de fases de circuito cerrado incluso en el rango inestable.
La Fig. 9 muestra la configuración del sistema de control de velocidad de un motor de control de velocidad de CA en un diagrama de bloques.
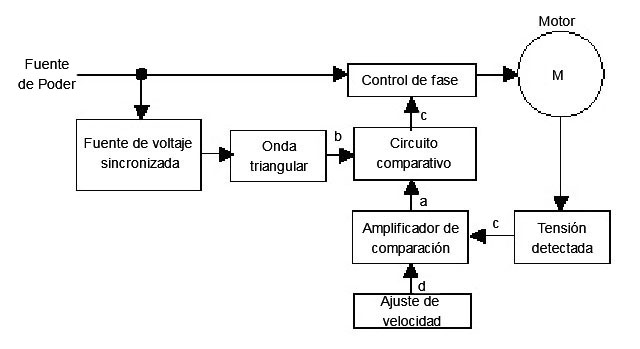
Fig. 9 Diagrama de bloques del sistema de motor de control de velocidad de CA
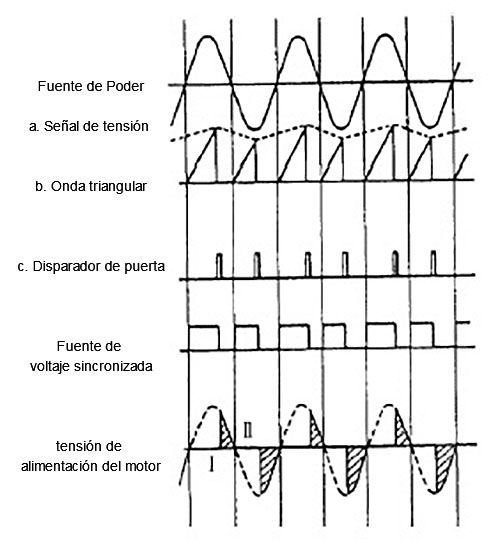
Fig. 10 Forma de onda de cada bloque
La Fig. 10 muestra las formas de onda de cada bloque. El valor establecido de velocidad (d) y el voltaje detectado (e) de velocidad generado por un tacogenerador se comparan en el bloque de amplificación de comparación. A continuación, se determina el nivel de la señal de voltaje (a).
La señal de voltaje (a) es baja si el valor de velocidad detectado aumenta con respecto al valor establecido y es más alta cuando el valor establecido de velocidad se reduce. Dado que la señal de activación es la salida en el punto en el que la onda triangular (b) entra en intersección con la señal de voltaje (a), se determina la sincronización (ángulo de fase) cuando el triac está activado con un nivel de la señal de voltaje (a). Cuando esta sincronización es lenta, el voltaje aplicado al motor es bajo y la velocidad de rotación del motor disminuye. La velocidad de rotación reducida es alimentada nuevamente y el control se repite para que la diferencia entre el valor detectado de velocidad y el valor establecido de velocidad siempre sea constante.
La Fig. 11 muestra la apariencia del control de velocidad antes mencionado. En la Fig. 11, el punto de operación del motor dibuja un bucle con Q-R-S-T centrado en O y la velocidad de rotación se mantiene entre N1 y N2. Este bucle se reduce todo lo posible mediante el aumento de la precisión de la detección de velocidad.
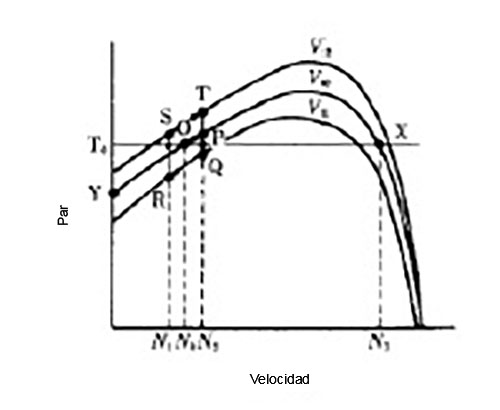
Fig. 11 Operación del control de velocidad
El motor de control de velocidad de CA tiene las siguientes características cuando se usa este control de fase de circuito cerrado.
1) Dado que el voltaje de CA es controlado directamente, el circuito de control de velocidad puede tener una configuración simple porque no se precisa un circuito suavizador, lo que permite un diseño compacto de bajo costo.
2) De la misma manera, es posible obtener un diseño de larga duración porque no se necesita un capacitor electrolítico grande de aluminio.
3) La conmutación es accionada solamente una vez cada medio ciclo de la red de alimentación de CA, que mantiene la generación de ruido en un bajo nivel.
2.1.3. Características
Los motores de control de velocidad de CA en general tienen las características de velocidad de rotación/par que se muestran en la Fig. 12.
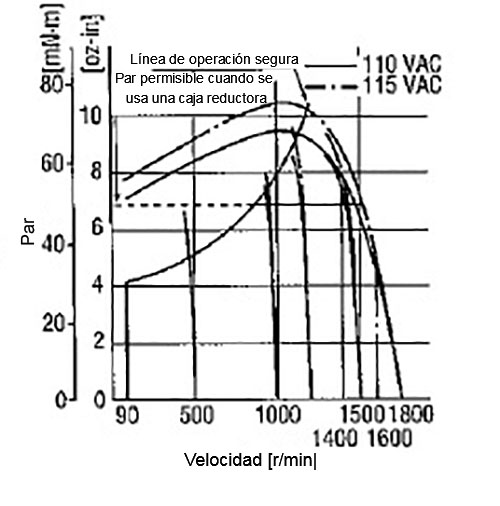
Fig. 12 Características de velocidad de rotación/par
En la Fig. 12 se incluye una "línea de operación segura". La "línea de operación segura" representa el límite hasta el que el motor puede funcionar a carga continua sin exceder la temperatura máxima admisible.
2.1.4 Presentación de los productos de Oriental Motor
A continuación se muestran nuestros motores típicos de control de velocidad de CA
 |
MSC-1 | Un controlador de velocidad del motor de CA, mejorado y fácil de usar, utiliza información proveniente del motor para emitir una señal de alarma en caso de anomalías. |
 |
ES01/ES02 | Diseñado para ofrecer comodidad en la operación o la conexión, con todas las funciones necesarias para el control de velocidad. |
 |
Serie US | Diseño con montaje en el panel para facilitar el uso y simplificar las funciones. |
Fig. 13 Grupo de productos: motores de control de velocidad de CA
La línea de motores de control de velocidad de CA incluye muchos valores de potencia de salida en vatios, relaciones de engranajes y opciones para adaptarse a una amplia gama de aplicaciones. Además, la línea de productos de motores de CA incluye modelos equipados con embrague y freno, freno electromagnético de interrupción de suministro y otras opciones.
2.2. Unidad de control de velocidad sin escobillas de CC
2.2.1. Estructura del motor
En cuanto a la estructura de un motor sin escobillas, posee una bobina con devanado en estrella (en Y) de tres fases, U, V y W que se encuentra en el estator, y el rotor está compuesto por imanes magnetizados en una configuración con múltiples polos, como se muestra en la Fig. 14.
Dentro del estator, tres CI Hall están dispuestos a modo de elementos magnéticos para que la diferencia de fases de la señal de salida de cada CI hall tenga 120 grados de separación en cada rotación del rotor.
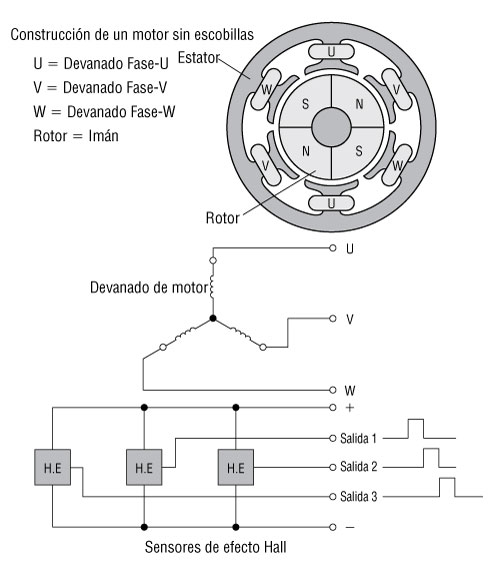
Fig. 14 Estructura de un motor de CC sin escobillas
2.2.2. Principio de control de velocidad
Como se muestra en la Fig. 15, las características de velocidad de rotación/par de un motor de CC sin escobillas muestra una pendiente negativa cuando su velocidad no está controlada, de manera similar a un motor de CC con escobillas.
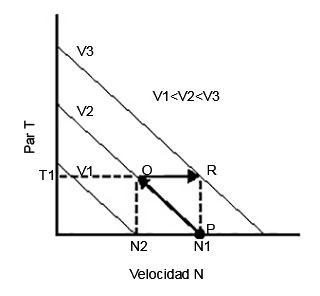
Fig. 15 Características de velocidad de rotación/par de un motor de CC sin escobillas
Cuando no se aplica carga y el voltaje de entrada se fija en V2 en la Figura 15, el punto de operación del motor se transforma en P y la velocidad de rotación es N1. Cuando se aplica la carga de par T1, el punto de operación pasa a Q y la velocidad de rotación se reduce a N2. Sin embargo, la velocidad de rotación regresa a N1 si el voltaje aumenta a V3. Por lo tanto, dado que la velocidad de rotación se modifica cada vez que cambia la carga de par, el mecanismo de control de velocidad solo deberá modificar el voltaje de entrada cuando se observe un cambio de velocidad para mantener una velocidad constante de la línea PR.
Este control de voltaje se logra gracias a un inversor en la parte de salida del circuito de control (excitador). Este inversor general tensión de CA trifásica a partir de la corriente CC mediante la activación y la desactivación como se muestra en la secuencia de la Fig. 16 (b) empleando seis elementos de conmutación (FET o IGBT), ilustrados en la Fig. 16 (a).
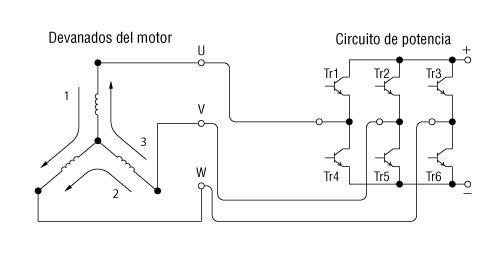
Fig. 16 (a) Parte de salida del circuito de control (excitador)
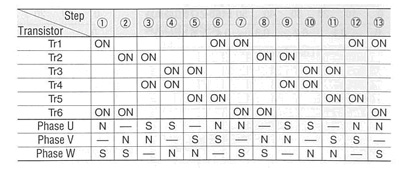
Fig. 16 (b) Secuencia de conmutación
Los elementos de conmutación están conectados al devanado del motor como se muestra en la Fig. 16 (a) y el estado activado/desactivado del elemento de conmutación determina qué bobina del estator se energiza y en qué dirección fluirá la corriente, es decir, qué bobina se transforma en un polo N o en un polo S.
De hecho, el IC Hall detecta la posición del polo magnético del rotor y se activa o se desactiva el elemento de conmutación correspondiente, como se muestra en la Fig. 16 (b). Por ejemplo, en el caso del paso 1, los transistores Tr1 y Tr6 se activan y la corriente fluye desde la fase U hasta la fase W. En este momento, la fase U se excita como polo N y la fase W se transforma en el polo S, y el rotor gira 30 grados y así se desplaza al paso 2. Una rotación del motor se conforma por la repetición de esta operación 12 veces (paso 1 ~ 12).
La Fig. 17 muestra la configuración del control de velocidad de un motor de control de CC sin escobillas en un diagrama de bloques.
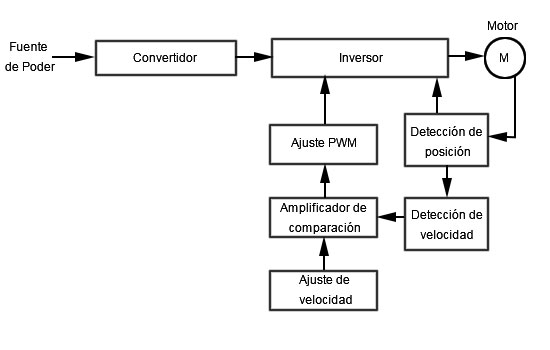
Fig. 17 Diagrama de bloques del sistema de motor de CC sin escobillas
La secuencia de conmutación del inversor es decidida por la señal del CI Hall en la parte de detección de posición del diagrama de bloques, y el motor rota.
A continuación, la señal del CI Hall se envía al detector de velocidad para transformarse en la señal de velocidad, y se la compara con la señal establecida de velocidad en el bloque de amplificación de comparación, que a continuación genera una señal de desviación. El valor de la corriente de entrada del motor es determinado por el bloque de ajuste de modulación de ancho de pulso (PWM) de acuerdo con la señal de desviación.
Los motores de CC sin escobillas tienen las siguientes características.
1) Tiene alta eficiencia porque se usa un rotor de imán permanente y la pérdida secundaria es baja.
2) La inercia del rotor se puede reducir y se obtiene una respuesta de alta velocidad.
3) Es posible reducir las dimensiones del motor porque es altamente eficiente.
4) Las fluctuaciones de velocidad ante los cambios de carga son bajas.
La Fig. 16 muestra una secuencia típica de conmutación (método de energización de 120 grados). Un sistema de motor de CC sin escobillas aún más eficiente usa un método de excitación por onda sinusoidal mediante la obtención de información de alta resolución sobre la posición del rotor a través del software a partir de la señal del IC Hall. Este método da lugar a un método de excitación de bajo ruido ya que la corriente que fluye hasta el motor no se modifica rápidamente. (2)
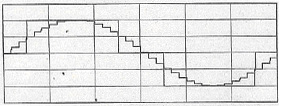
Fig. 18 Comparación de los voltajes aplicados por el método de excitación por onda sinusoidal y el método de excitación de 120 grados.
2.2.3. Características
Las características de la velocidad de rotación/par de un sistema de motor de CC sin escobillas tiene una región de carga limitada aparte del área de operación continua.
El área de operación de carga limitada es muy efectiva al comienzo de una carga inercial. Sin embargo, cuando la operación en la región de carga limitada continúa durante cinco o más segundos, se activa la función de protección de sobrecarga del excitador y el motor se desacelera hasta detenerse.
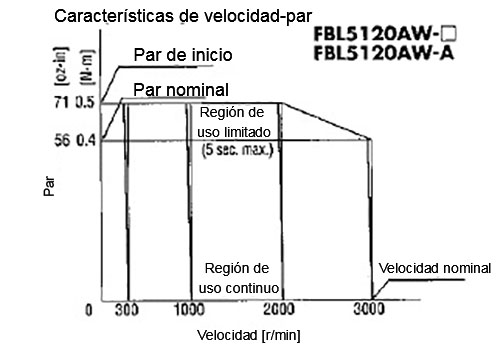
Fig. 19 Características de velocidad de rotación/par
2.2.4. Presentación de productos de Oriental Motor
A continuación se muestran nuestros motores de CC sin escobillas típicos.
 |
Serie BX | La serie BX de motores de CC sin escobillas ofrece altos desempeño y funcionalidad. Su producción máxima es de 400 W. Con un módulo de control, se encuentran disponibles las funciones de posicionamiento y limitación de par. |
 |
Serie BLF | La serie BLF de motores de CC sin escobillas ofrece alta velocidad de hasta 4000 rpm y se ajusta a las normas de seguridad en todo el mundo. Con el operador digital, se encuentran disponibles la configuración digital de velocidad y el visor. |
 |
Serie BMU | Paquete de motor de CC (BLDC) y excitador fáciles de usar de fácil conexión y operación. Par de hasta 260 libras/pulgada. Velocidades máximas de 4000 rpm. |
 |
Serie BLE | Conjunto de excitador y motor de CC sin escobillas (BLDC) estándar con caja reductora que entrega un par de hasta 600 libras/pulgada. Frenos electromagnéticos opcionales. Velocidades máximas de 4000 rpm. |
 |
Serie BLH | Excitador compacto para tablero con motor de CC sin escobillas (BLDC). Hasta 600 libras/pulgada de par y velocidades máximas de 3000 rpm. |
 |
Serie BLV | Paquete de motor de CC sin escobillas (BLDC) de alta potencia y excitador con entrada de CC. Control de comunicaciones mediante E/S o RS-485. Par de hasta 970 libras/pulgada. Velocidades máximas de 4000 rpm. |
Fig. 20 Grupo de motores de c.c sin escobillas
La línea de motores de CC sin escobillas cuenta con una amplia gama de modelos que combinan excitadores con motores de CC sin escobillas.
Las series de alto desempeño BX y BLF emplean el método de excitación por onda sinusoidal para una operación con bajo ruido.
Además, la serie BX puede controlar la velocidad en aplicaciones verticales gracias a la combinación de un motor con un freno electromagnético. También es posible controlar la posición y limitar el par con las herramientas de mejora del sistema opcional.
2.3. Unidad de control con inversor
2.3.1. Principio de control de velocidad
El inversor controla la velocidad de un motor de inducción trifásico mediante el cambio de frecuencia (f) del voltaje aplicado al motor. El inversor cambia la frecuencia (f) modificando el ciclo de activación/desactivación de los seis elementos de conmutación, y la velocidad de rotación (N) del motor se modifica en forma proporcional a la expresión de la fórmula (1).
N= 120·f ·(1-s)/P·· · · · · · · · · (1)
N: Velocidad de rotación [rpm]
F: Frecuencia [Hz]
P: Cantidad de polos de un motor
S: Deslizamiento
Además, para que el voltaje aplicado al devanado adopte una forma de onda sinusoidal, el inversor controla el ciclo de carga activada/desactivada como se muestra en la Fig. 21. El tiempo de activación/desactivación se controla de manera que el voltaje promedio aplicado al motor adopte una forma de onda sinusoidal mediante la comparación de la onda triangular denominada señal de transporte con la forma de onda de la señal sinusoidal. Este método se denomina control PWM.
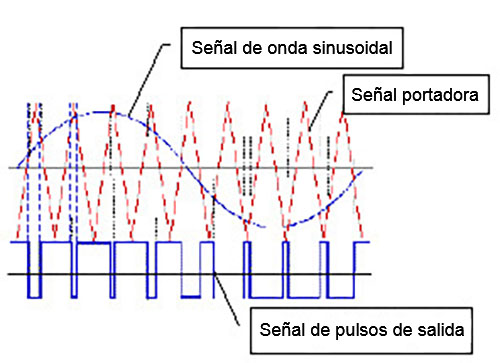
Fig. 21 Control de carga de activación/desactivación
El método de control de velocidad de nuestros inversores se divide en dos tipos: control de circuito abierto, que simplemente modifica la velocidad, y control de circuito cerrado, que reduce la variación de velocidad mediante cambios de la carga del motor.
1) Control de circuito abierto
La Fig. 22 muestra una configuración del control de circuito abierto en un diagrama de bloques.
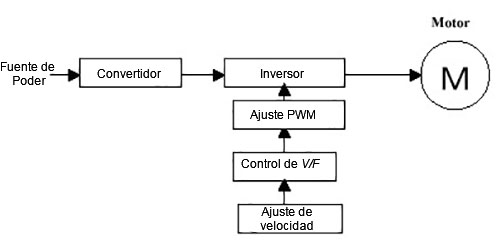
Fig. 22 Diagrama de bloques del control de circuito abierto
Este método se usa para modificar el voltaje de entrada y la frecuencia del motor de acuerdo con una frecuencia establecida. Este método es apto para modificar la velocidad y puede lograr velocidades altas (puede establecerse una frecuencia máxima de 80 Hz) fácilmente cuando la regulación de velocidad con cargas variables no representa una gran preocupación.
El par generado T del motor se muestra junto a la fórmula (2). A partir de esta relación, se puede afirmar que el par también se mantendrá constante si se mantiene constante V/f, la relación entre el voltaje V y la frecuencia f.
T=K·I·V/f···(2)T: Par [N·m]
V: Tensión de alimentación [V]
I: Corriente del motor [A]
f: Frecuencia [Hz]
K: Constante
Sin embargo, cuanto más baja es la velocidad, más difícil resulta mantener constante la impedancia de entrada del motor de inducción con el cambio en f. Por lo tanto, para obtener un par constante desde la velocidad baja a la alta, es necesario ajustar la relación V/f a baja velocidad de acuerdo con las características del motor, como la línea lisa que se muestra en la Fig. 23.
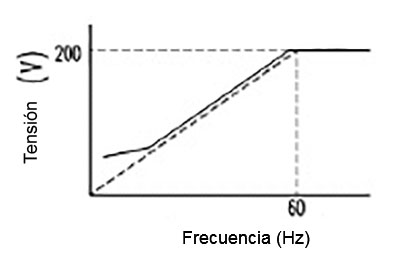
Fig. 23 Control de V/f
2) Control de circuito cerrado
La Fig. 24 muestra la configuración del diagrama de bloques del sistema de control de circuito cerrado usado en nuestra serie BHF.
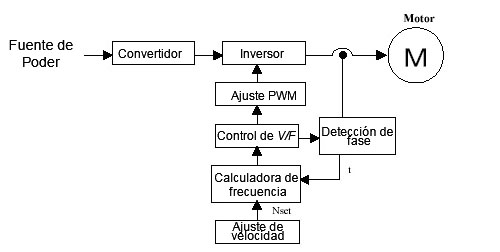
Fig. 24 Diagrama de bloques del control de circuito cerrado
Este método detecta la diferencia de fases entre el voltaje del bloque de salida del inversor y la corriente principal, que calcula la frecuencia de excitación correspondiente a la carga empleando la tabla de datos de características (Fig. 25) preparada de antemano, y controla la frecuencia del inversor sin necesidad de colocar un sensor de velocidad en el motor.
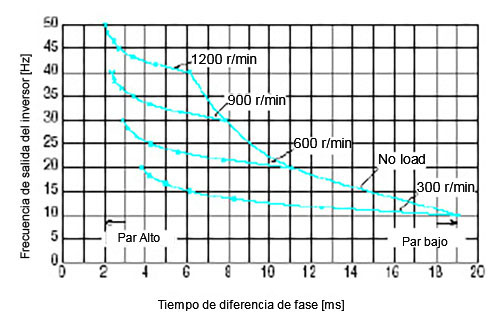
Fig. 25 Tabla de datos de características
Con esta tabla de características y el tiempo de diferencia de fases detectado (t), el inversor calcula una frecuencia de salida que se corresponda con el comando de velocidad de rotación (Nset) establecido por el potenciómetro de velocidad y su resultado es la frecuencia de salida del inversor. Después de recibir la frecuencia de salida, el bloque de control de V/f calcula el voltaje aplicado al motor correspondiente a la frecuencia de salida (f) y ejerce el control de velocidad excitando el inversor PWM. En consecuencia, se aplica una carga y la frecuencia de salida del inversor se incrementa para compensar la reducción de la velocidad de rotación. (3)
2.3.2. Características
Las características de la velocidad de rotación/par del inversor se muestran en las Fig. 26 y 27. Como se explica en la sección sobre motores de a.c. de control de velocidad, se establece una "línea de operación segura" en las propiedades de par. Esta línea representa el límite de operación continua y el área debajo de ella se denomina área de operación continua.
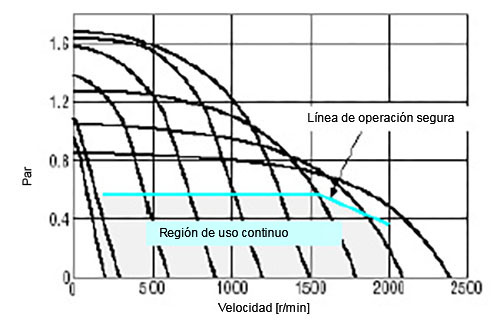
Fig. 26 Características de velocidad de rotación/par del control de circuito abierto
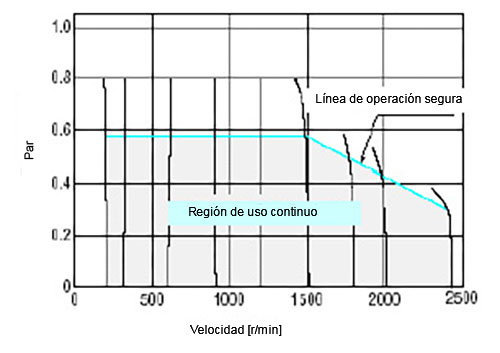
Fig. 27 Características de velocidad de rotación/par del control de circuito cerrado
2.3.3. Presentación de productos de Oriental Motor
 |
Serie BHF | BHF es un inversor que ha aprobado las normas de seguridad. Es posible usarlo en aplicaciones verticales con un freno electromagnético. |
Fig. 28 Grupo de productos de inversores
Es posible lograr el máximo desempeño del motor ya que la constante de todos nuestros motores está preestablecida en el circuito de control de velocidad del inversor. Además, las series BHF y UV operadas con modo de control de circuito cerrado pueden usarse en aplicaciones verticales mediante la combinación de un motor con un freno electromagnético.
3. Resumen
Oriental Motor ofrece tres grupos de productos (motores de control de velocidad de CA, motores de control de velocidad de CC sin escobillas e inversores) que pueden utilizarse en una amplia gama de aplicaciones de control de velocidad. Se puede seleccionar el producto de control de velocidad adecuado sobre la base de la función, el desempeño, el costo y la finalidad deseados para la aplicación.
La Tabla 1 muestra el amplio rango de desempeño de control de la velocidad (relación de engranajes y velocidad máxima) y la regulación de velocidad de los modelos típicos en estros tres grupos de productos.
Tabla 1 Rango de control de velocidad e índice de variabilidad de cada grupo de productos
Orienta Motor continuará trabajando en el desarrollo de productos para poder ofrecer los productos que mejor se adecuen a las diversas necesidades de nuestros clientes en el futuro.
Referencias
(1) AC Motor Technology Study Group: “Book to understand AC small motor” (Grupo de estudio de la tecnología de motores de CA: “Guía para comprender los motores de CA pequeños”), Kogyo Chosakai Publishing (1998)
(2) Kazuo Abe: “Low-noise drive technology of Brushless motor” (Tecnología de excitación de bajo ruido en motores sin escobillas), RENGA No.163, pp.19-25 (2003)
(3) Koji Namihana, Masayoshi Sato: “New control method of three-phase induction motor” (Nuevo método de control de los motores de inducción trifásicos), RENGA No.159, pp.23-28 (1999)
Kazuya Shirahata
Kazuya Shirahata
Planta Tsuruoka, Operaciones ACIX
División de Tecnología de circuitos
Sección Desarrollo de Circuitos
![]()
Horas de trabajo:
de Lunes a Viernes
8:30am EST a 5:00pm PST
Ventas y servicio al cliente:
1-800-468-3982
y llamadas internacionales
al + 001-847-871-5931