
![]()
Para Inglés o Español:
Para japonés:
Clientes de Mexíco:
Servicio Al Cliente - +001-847-871-5931
Soporte técnico - 800-681-5309
Clientes Internacionales:
+1-847-871-5931 o
+1-310-715-3304
Para soporte en productos del catálogo japonés:
1-800-746-6872 o
+1-310-715-3304


















PKP Series 2-Phase Bipolar Stepper Motors

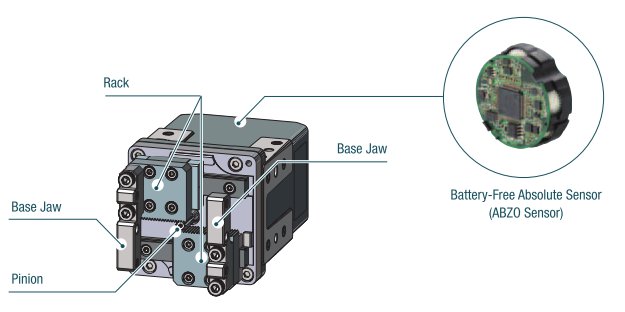
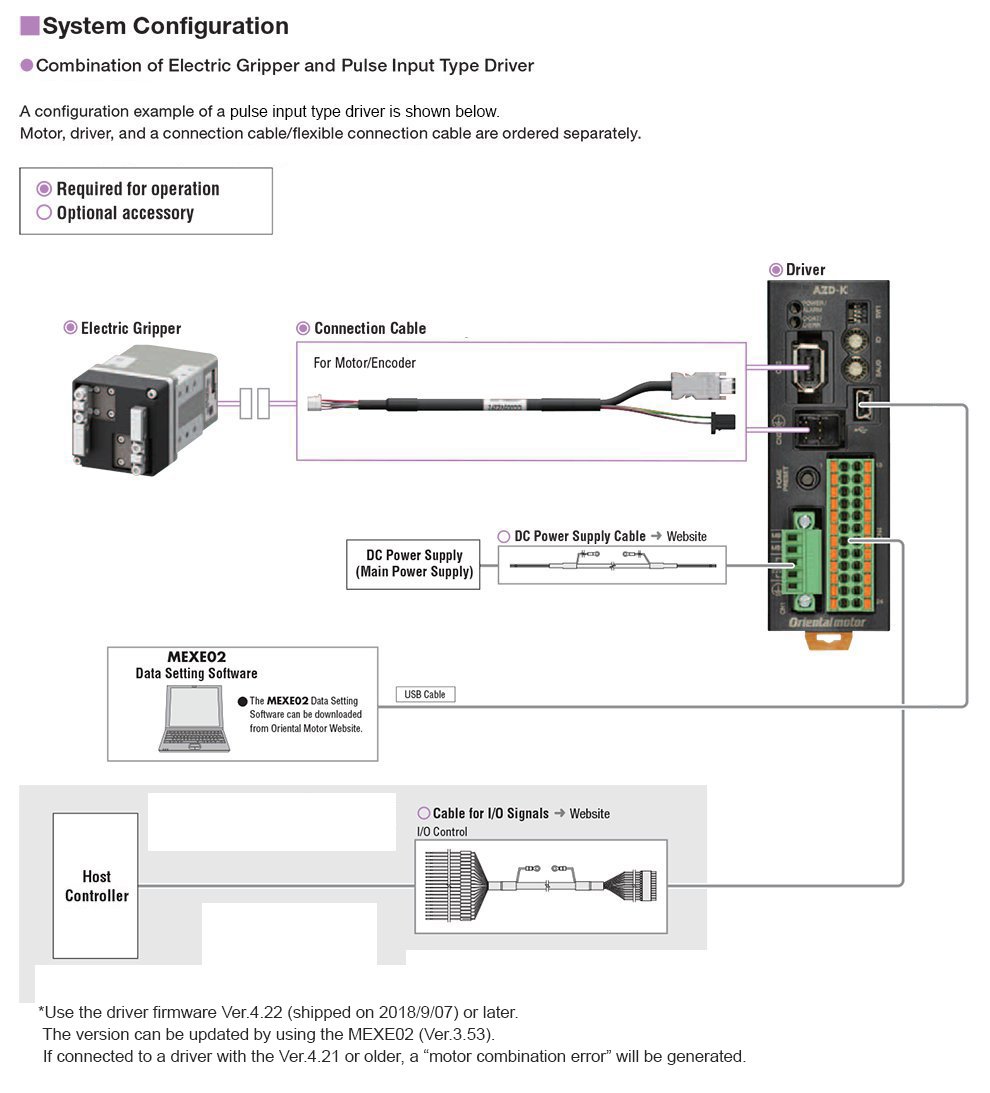
Pinza eléctrica Serie EH - Serie AZ equipada
La serie EH es una pinza eléctrica basada en un mecanismo de piñón y cremallera equipada con un motor de la serie AZ. Su agarre delicado, como el de una mano humana, ayuda a automatizar y ahorrar trabajo.
- Proporciona un agarre delicado similar al humano para aplicaciones robóticas
- Sensor absoluto sin batería incorporado, para un monitoreo constante de la información de posición del motor sin un sensor externo
- Alta fiabilidad con control de circuito cerrado
- La tecnología de alta eficiencia reduce la generación de calor del motor y ahorra energía
- Se requiere controlador de la serie AZ (entrada de CC) *

Codificador absoluto mecánico
Línea de Productos
Actuador |
Talla |
Max. Fuerza de agarre |
Carrera |
Reacción |
Max. Velocidad |
Velocidad de empuje |
|
46 mm |
25 |
25 (12.5 cada lado) |
0.1 |
156 |
20 |

Agarre delicado

A delicate grip is achieved by fine-tuning the grip force in 1% operating current increments and implementing a slow approach to the load.
Contribuye a la reducción del tamaño y el peso del equipo
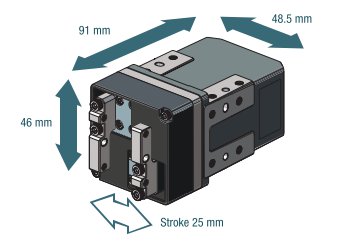
Pequeña y ligera
91 mm × 46 mm × 48,5 mm de tamaño y pesa 380 g.
La combinación de un motor con un tamaño de bastidor de 28 mm y el mecanismo de piñón y cremallera da como resultado un equipo más pequeño. Con una carrera de 25 mm disponible para agarrar la carga.
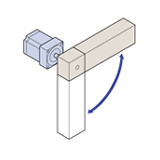
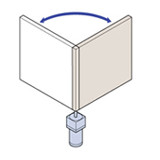
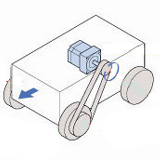
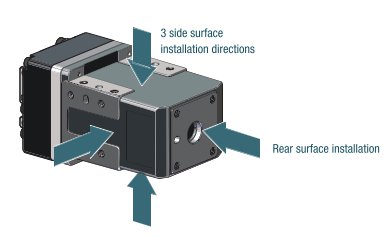
Es posible la instalación en varias direcciones
El diseño es compatible con la instalación de múltiples superficies, lo que lo hace ideal para la instalación en brazos robóticos, etc.
Funciones
Un agarre delicado se logra ajustando con precisión la fuerza de agarre en incrementos de corriente de operación del 1% e implementando un acercamiento lento a la carga.
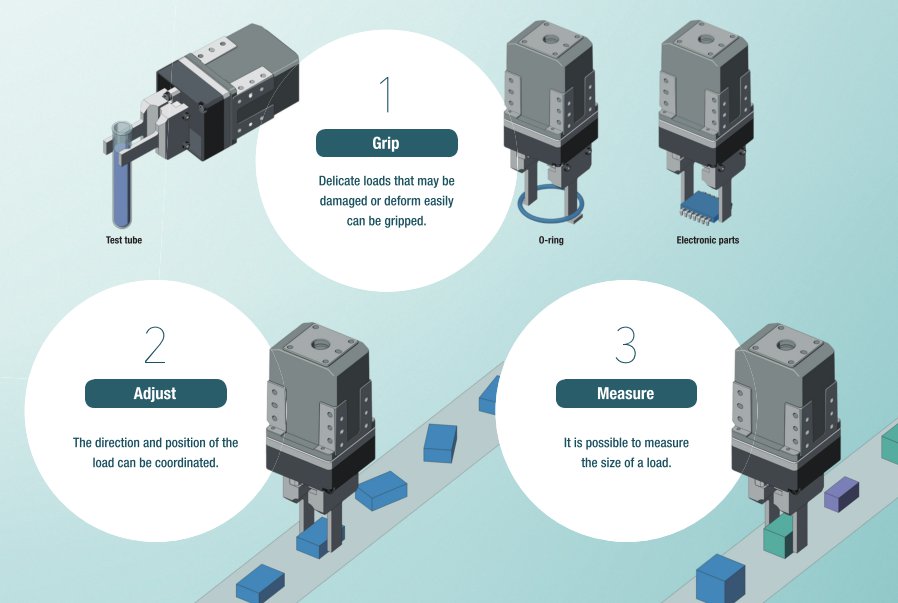
Agarre de manera confiable cargas que pueden deformarse o romperse fácilmente
Configure fácilmente la fuerza de agarre, el tiempo de agarre y la velocidad de acuerdo con el objeto que está agarrando.
Agarre de forma segura y confiable objetos que puedan romperse fácilmente, como vidrio, y objetos que se deforman fácilmente, como plástico o resortes.
Aproximación rápida, agarre lento
El motor se acerca a la carga a alta velocidad, luego desacelera justo antes de tocar la superficie a baja velocidad.
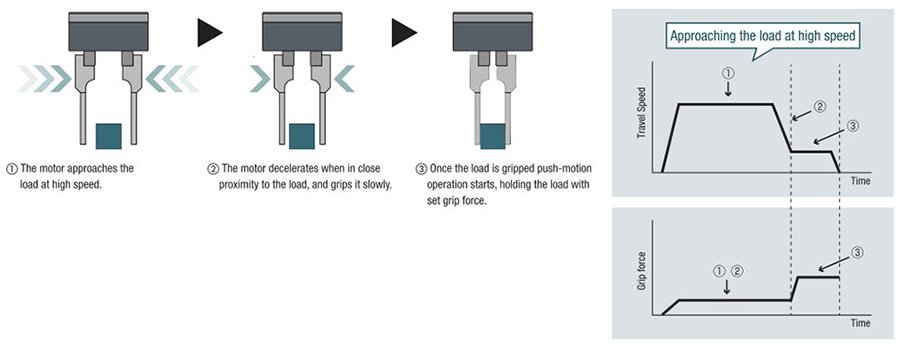
Agarra con fuerza de agarre baja, luego aumenta gradualmente la fuerza
La fuerza de empuje y la sincronización se pueden cambiar fácilmente.
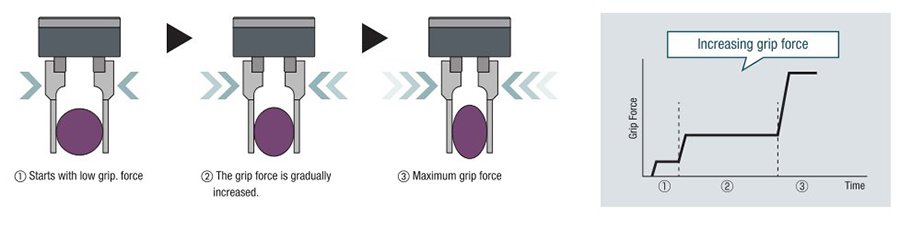
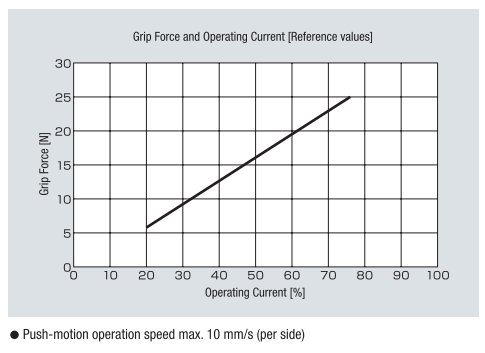
Características de la fuerza de agarre durante la operación de movimiento de empuje
El movimiento de agarre de la pinza eléctrica funciona mediante la operación de movimiento de empuje. La fuerza de empuje (fuerza de agarre) se establece de acuerdo con la corriente de funcionamiento del motor.
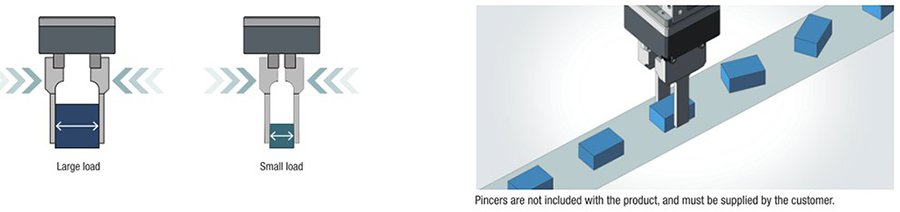
La dirección y la posición de la carga se pueden coordinar
La distancia mínima de recorrido entre las pinzas, unidas a las mordazas de la base, es de 0,02 mm. La dirección y la posición de los componentes se pueden coordinar sujetándolos según su tamaño.
El tamaño de la carga se puede verificar sin un sensor externo
El tamaño y la presencia de una carga se determinan dentro del rango operativo de las tenazas
El rango de operación de la pinza está con fi rmado por la señal de salida (salida TLC, salida AREA) del controlador, lo que permite determinar el tamaño y la presencia de una carga.
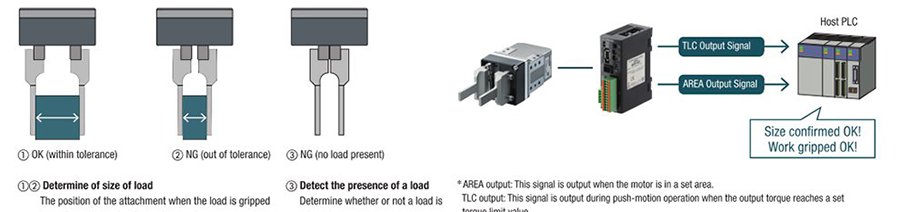
Supervise la posición de la pinza para medir el tamaño
La función de monitoreo de información de coordenadas en el controlador envía datos desde la pinza al PLC host, lo que permite medir el tamaño de la carga.

Tipos de producto
Elimine los sensores adicionales con un sistema absoluto sin batería
El codificador mecánico absoluto AlphaStep de la serie AZ está disponible como una solución líder de movimiento absoluto sin batería de circuito cerrado que se vende como paquetes de motor paso a paso + controlador, actuador lineal y actuador giratorio que permiten un rendimiento avanzado absoluto y sin batería en una amplia gama de aplicaciones. Todos los productos de la serie AlphaStep AZ ofrecen un rendimiento garantizado y están disponibles en tipos de entrada de pulso o controlador integrado (red) en entrada de CA o CC. También está disponible un controlador / controlador de múltiples ejes de entrada de CC para conectar hasta 4 ejes con una unidad.








Sistema absoluto equipado con el sistema de control híbrido de la serie αSTEP AZ
Tecnología avanzada a precios asequibles
Oriental Motor ha desarrollado y patentado un sensor absoluto de tipo mecánico compacto, de bajo costo y sin batería. La serie AZ está disponible a precios accesibles y puede contribuir a mejorar la productividad y reducir los costos.
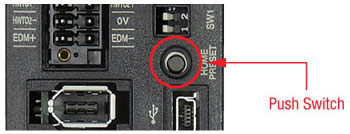
Método de configuración de inicio
La posición de inicio puede configurarse fácilmente al oprimir un interruptor en la superficie del excitador. El sensor absoluto guardará esta configuración. Además, la configuración de inicio es posible con el software de configuración de datos MEXE02 o la señal de entrada externa.
Sensor de tipo mecánico (no requiere batería)
Se utiliza un sensor mecánico compuesto por varios engranajes. La información de posicionamiento se detecta al reconocer el ángulo de los engranajes individuales. Como resultado, no requiere una batería.
Sistema absoluto de rotación múltiple
La detección de posición absoluta es posible con ±900 rotaciones (1800 rotaciones) del eje del motor desde la posición de inicio.
Método de configuración del hogar
La posición inicial se puede configurar fácilmente presionando un interruptor en la superficie del controlador, que se guarda con el Encoder Mecánico Absoluto. Además, la configuración de inicio es posible con el software de configuración de datos MEXE02 o la señal de entrada externa.
La posición inicial es fácil de ajustar moviendo el motor a la posición deseada manualmente.
No se requiere batería
No se requiere batería, gracias al sensor de tipo mecánico. Debido a que la información de posicionamiento se maneja de forma mecánica mediante el sensor absoluto, esta información puede preservarse, aunque se corte la energía o se desconecte el cable entre el motor y el excitador.

Mantenimiento reducido
Debido a que no requiere una batería que deba reemplazarse, el tiempo y el costo de mantenimiento se ven reducidos.
Posibilidades de instalación del excitador ilimitadas
Ya que no es necesario asegurar espacio para el reemplazo de la batería, no existen restricciones para la ubicación de instalación del excitador, lo que mejora la flexibilidad y la libertad del diseño de configuración de la caja de control.
Seguro para su envío al extranjero
Las baterías comunes se auto descargan, por lo que debe tenerse cuidado cuando el equipo requiere un tiempo prolongado de envío, como cuando se lo envía al extranjero. El sensor absoluto no requiere baterías, por lo que no existen límites en cuanto a la conservación de la información de posicionamiento. Además, no hay necesidad de preocuparse por las distintas regulaciones de seguridad, que deben tenerse en cuenta al enviar una batería al extranjero.
La posición se mantiene aunque el cable entre el motor y el excitador se desconecte
La información de posicionamiento se almacena dentro del sensor absoluto.
*Debido a que la información de posicionamiento se almacena en el sensor absoluto, la posición de inicio debe restablecerse si el motor se reemplaza.
Controladores de entrada de CC de la serie AZ

Los controladores de entrada de CC AlphaStep ofrecen voltaje de entrada de 24/48 V CC, alta funcionalidad y control de circuito cerrado. No hay que comprar sensores externos ya que el motor y el controlador completan el sistema. Disponible en 5 tipos; un controlador de datos almacenados (red), controlador de entrada de pulsos, entrada de pulsos con comunicaciones RS-485, compatible con EtherCAT o EtherNet / IP para monitoreo. El funcionamiento avanzado y el control de funciones se incluyen a través de nuestro software MEXE02 (descarga gratuita). El AlphaStep AZD-K (entrada de CC) puede realizar operaciones de posicionamiento rápido en una distancia corta sin necesidad de sintonización, mientras proporciona un rendimiento suave.
- Funciones de protección integradas
- Entrada de pulsos, entrada de pulsos con comunicaciones RS-485, controlador integrado (red), tipos EtherCAT o EtherNet / IP ™
- 24/48 V CC
- Para usar con motores AlphaStep de la serie AZ (entrada de CC)
Multi-Axis Controller / Driver (EtherCAT)

A multi-axis controller that supports EtherCAT communication.Compatible with the CiA402 drive profile. It can be connected to the AZ Series DC input motors and electric actuators.
2-axis, 3-axis and 4-axis driver connections are available.
- 24/48VDC
![]()
Cables

Estos cables se utilizan para conectar o ampliar la distancia entre el motor y el conductor.
Requerido (se vende por separado)
Utilice un cable de motor flexible si el motor está instalado en una pieza móvil o su cable se flexionará.
Configuración del sistema
Pinza robótica serie EH con folleto AZ

