
![]()
Para Inglés o Español:
Para japonés:
Clientes de Mexíco:
Servicio Al Cliente - +001-847-871-5931
Soporte técnico - 800-681-5309
Clientes Internacionales:
+1-847-871-5931 o
+1-310-715-3304
Para soporte en productos del catálogo japonés:
1-800-746-6872 o
+1-310-715-3304


















CRD 5-Phase Excitadores de motor paso a paso (Entrada de CC)

Excitadores de motor paso a paso de 5 fases CRD
El excitador de motor paso a paso de 5 fases CRD con controlador integrado, y almacenamiento de datos o almacenamiento de programa es un excitador/controlador de 5 fases superior y compacto para los motores paso a paso de 5 fases New Pentagon. El que presenta almacenamiento de datos es compatible con redes, funciona con la línea de productos FLEX para conectividad y ofrece opciones de programación avanzadas. Ambos tipos producen el nivel de vibración más bajo a través del uso de un motor de 5 fases y control de micropasos de avanzada. Además ofrecen una gran variedad de funciones y opciones de control.
- Almacenamiento de datos (red) o almacenamiento de programa
- Excitador de micropasos de 5 fases con bajo nivel de vibración
- Diseño compacto
- 24 VCC/0.35 ~ 1.4 A


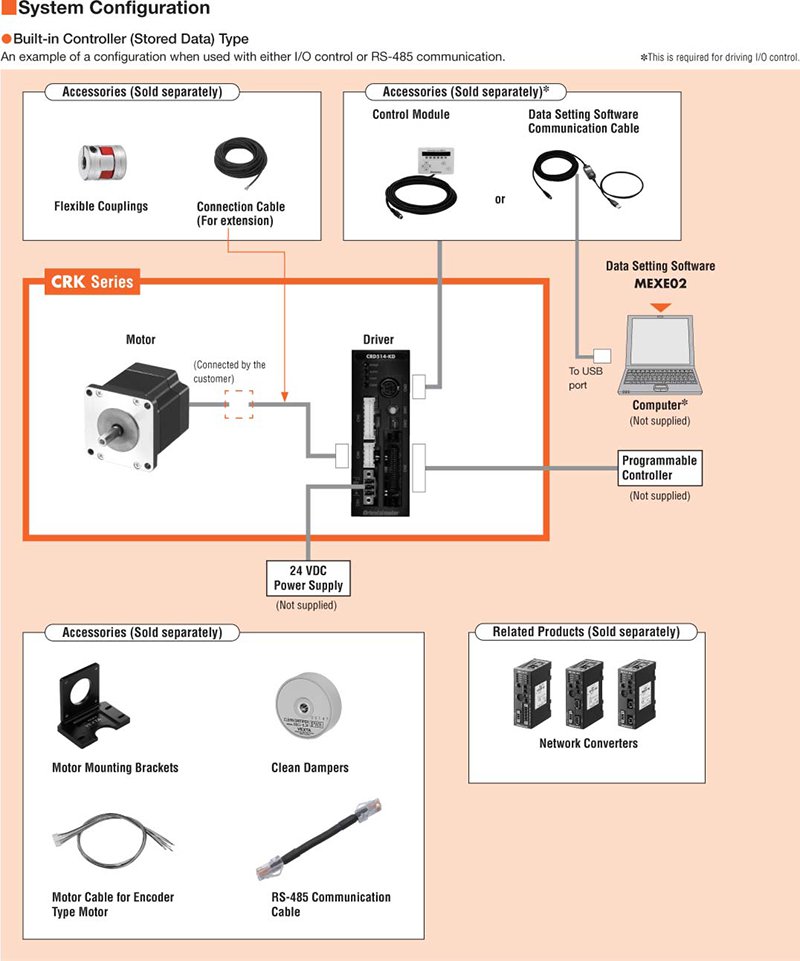
Excitador de controlador integrado (Red)
Ahorro de espacio, cableado reducido
Dado que no se requiere un generador de pulsos y el controlador es también compacto, se consigue ahorro de espacio y simplificación del sistema.
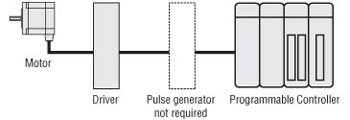
El excitador compacto con controlador integrado ahorra espacio.
El excitador se puede montar en un carril DIN.

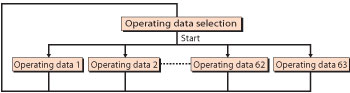
Máximo 63 Puntos de Datos Operativos
Se pueden configurar hasta 63 puntos de datos operativos en el controlador. Es posible ajustar el modo incremental (especificación de distancia relativa) y el modo absoluto (especificación de posición absoluta) para cada dato.
Los datos de funcionamiento se ajustan con el módulo de control de accesorios OPX-2A (vendido por separado), el software de configuración de datos MEXE02 o la comunicación RS-485.
Operación de posicionamiento
La velocidad de operación y la cantidad de desplazamiento del motor se configuran mediante los datos operativos y las operaciones se realizan según los datos operativos seleccionados.
Operación Vinculada
Si los datos de funcionamiento están ajustados a "enlazado", el posicionamiento El siguiente número de datos es posible con una señal START.
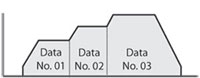
[Operación Vinculada]
Si se selecciona el dato No. 01 y se ingresa la señal START, se realiza el accionamiento vinculado del dato No. 01 al dato No. 03 sin que el motor se detenga.
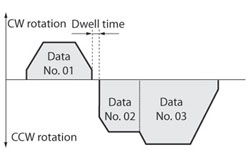
[Operación Vinculada 2 ]
Si se selecciona el dato No. 01 y se ingresa la señal START, se ejecuta la operación del dato No. 01. Después de eso, se detiene únicamente durante el tiempo de permanencia1 configurado y luego se ejecutan las operaciones del dato No. 02 al dato No. 03. Los datos operativos con una dirección de rotación diferente también pueden vincularse.
1El tiempo de permanencia es el tiempo de espera hasta que comienza la siguiente operación de posición.
Operación secuencial
Si los datos operativos se configuran en "posicionamiento secuencial", el posicionamiento del siguiente número de dato se realiza en secuencia cada vez que se ingresa una señal START.
Función de emisión de la señal PLS-OUT
Es posible realizar operaciones sincrónicas
Se emite una señal con el mismo número de pulsos y la misma velocidad de pulso que el valor de comando. Se ingresa una señal PLS-OUT y una señal DIR-OUT (señal de dirección de rotación) en otro excitador, lo que permite accionar un motor en un eje diferente.
Utilización para conteo de posición
La posición de comando con respecto al motor puede confirmarse mediante el conteo de las señales de salida.
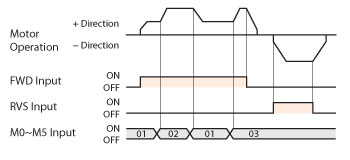
Operación de control de velocidades
El motor opera de forma continua mientras se ingresa una señal FWD o RVS. Debido a que opera a la velocidad de los datos operativos establecidos de antemano, puede realizarse una operación de cambio de velocidad multipaso al cambiar el número de dato.
Operación de regreso al inicio
Está equipado con una secuencia para la operación de regreso al inicio que reduce la carga en el anfitrión (controlador maestro) y los problemas de combinar programas o secuencias. Se requiere un sensor independiente.
Función de envío grupal
Pueden configurarse grupos con múltiples ejes conectados vía comunicación RS-485 o un convertidor de red, y pueden enviarse comandos a cada grupo. También es posible el arranque en simultáneo de múltiples ejes y operaciones idénticas.
Motores con codificador
Las rotaciones del motor pueden detectarse al recibir retroalimentación del codificador directamente en el controlador integrado.
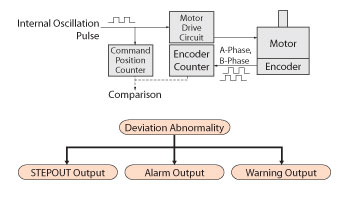
Función de emisión de señal STEPOUT
Si la desviación entre la posición de comando del excitador y el valor del contador del codificador alcanza el valor configurado (anomalía por desviación), se emite una señal STEPOUT. Pueden detectarse errores de posición, por ejemplo, errores causados por cambios rápidos en la carga.
Función de emisión de alarmas**
Cuando se produce una anomalía por desviación, se genera una alarma de desbordamiento, y el motor se detiene.
Función de emisión de advertencia**
Cuando se produce una anomalía por desviación, se genera una advertencia de desbordamiento. El motor continúa operando.
*Pueden configurarse parámetros para que se emita una alarma o una advertencia cuando se produzca una anomalía por desviación.
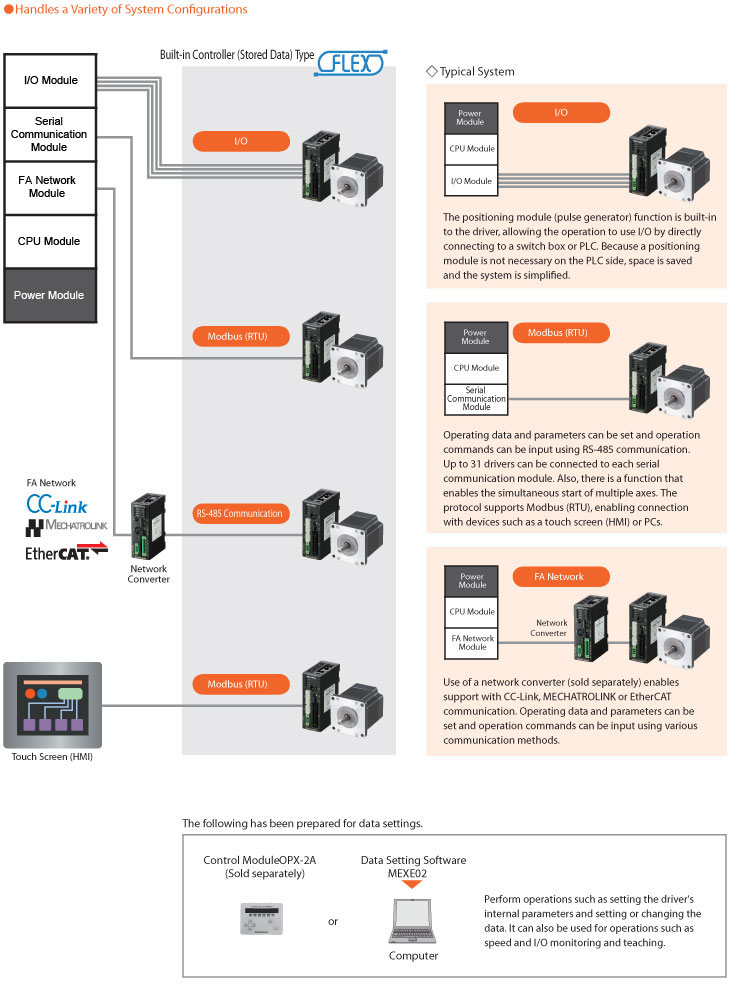
Equipados con una interfaz que se conecta a distintos sistemas de control maestro
FLEX es el nombre genérico de ciertos productos que se utilizan para el control de redes de Automatización Industrial (FA, Factory Automation) mediante control de E/S, control por Modbus (RTU) o un convertidor de red.
Los productos FLEX simplifican las conexiones y el control, y reducen la complejidad de la configuración del sistema.
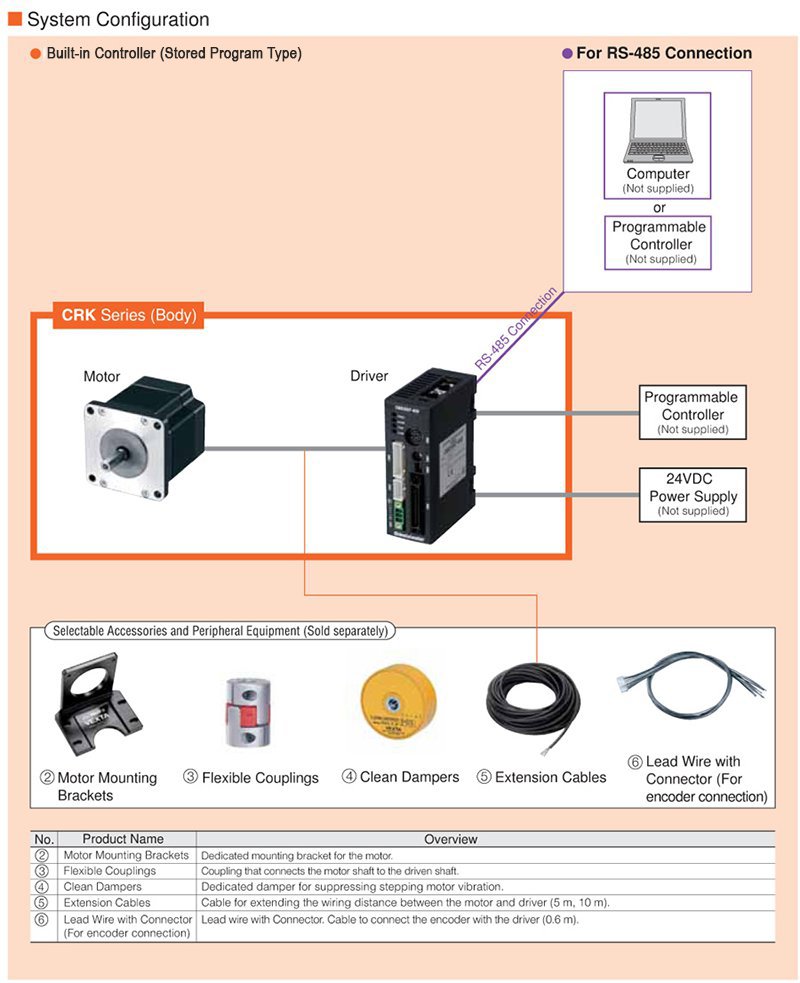
Tipo de Controlador Integrado (programa almacenado)
Funciones del controlador integrado
La serie CRK con controlador integrado es un paquete de motor paso a paso y excitador compacto que ahorra espacio, con un potente controlador integrado que incluye una gran variedad de funciones. El excitador admite comunicaciones RS-485 con conexión multipunto para operación de redes y control de E/S.
El excitador compacto con controlador integrado ahorra espacio.
El excitador puede montarse en un carril DIN.
Hasta 64 secuencias de programa
Disponibilidad de hasta 64 secuencias de programa. Están disponibles el modo incremental (especificación de distancia relativa) y el modo absoluto (especificación de posición absoluta).
3 modos de operación
- Comando directo: entrada de una terminal, un PLC o un controlador maestro.
- Operación independiente: ejecución de programas almacenados seleccionados mediante E/S.
- Datos variables: todo parámetro configurable o valor variable ingresado/cambiado mediante entrada directa de un anfitrión será usado por la secuencia almacenada.
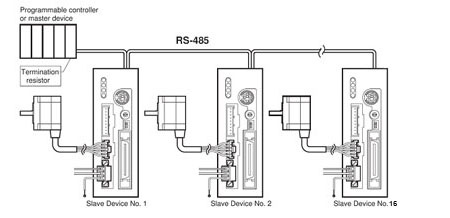
Comunicaciones RS-485
- Conexión multipunto de hasta 16 unidades
- Programación basada en PLC o PC
- Detección de alarmas, errores y advertencias
Ejemplos de perfil de movimiento
- Posicionamiento repetitivo
- Parada mediante entrada del sensor
- Operación continua a velocidades variables
- Movimiento vinculado, hasta cuatro como máximo
- Regreso al inicio mecánico o eléctrico
- Función PLS-OUT: accione un segundo excitador con el mismo conteo de pulsos que el primer motor.
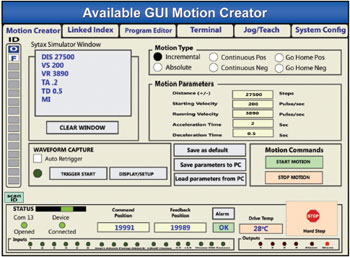
Software creador de movimiento (GUI)
- Cree movimientos básicos de manera sencilla, como movimientos incrementales, absolutos, vinculados y continuos
- Use el editor de programa para crear perfiles de movimiento complejos
- Use comandos del editor integrado con la función "arrastrar y soltar"
- Clonado simple con funciones de carga/descarga a una PC
- Use el monitor de movimiento para ver todas las entradas, las salidas, la posición del motor y el estado de las alarmas
- Menú de ayuda integrado
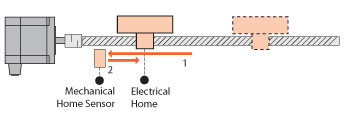
Operación de regreso al inicio
La operación de regreso al inicio puede realizarse fácilmente mediante un sensor de posición de inicio o un sensor que representa un punto de referencia de posición (inicio) si está disponible.
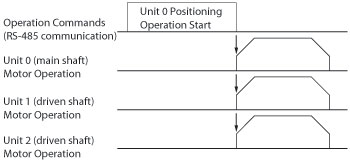
Función de emisión de la señal PLS-OUT
Sincronía disponible
La emisión de la señal PLS-OUT se utiliza para emitir el pulso de oscilación interno del excitador a un segundo excitador, lo que permite controlar el segundo motor en sincronía con el primero. La cantidad de pulsos emitidos corresponde al desplazamiento comandado y la frecuencia de los pulsos corresponde a la velocidad de operación.
Utilización para conteo de posición
Al contar las señales de salida, se puede verificar la posición comandada del motor.
Ejemplos de movimiento
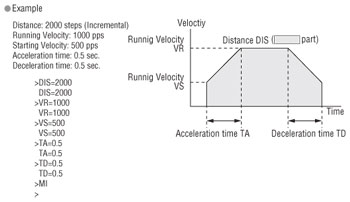
[Operación incremental]
La velocidad de operación y la distancia del movimiento del motor se establecen para ejecutarse según el programa seleccionado.
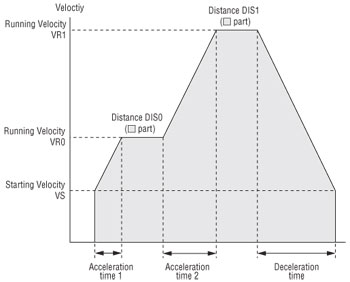
[Operación vinculada]
Use hasta 4 velocidades de funcionamiento entre las posiciones de arranque y parada. Cada movimiento tiene su propia distancia. Después de "vincular" los datos, los diferentes movimientos se activarán con una única señal de inicio.
[Operación continua a velocidades variables]
La velocidad del motor puede cambiarse fácilmente mientras el motor funciona de manera continua con un nuevo comando de movimiento.
Motores con codificador
Las rotaciones del motor pueden detectarse al recibir señales de salida del codificador en el controlador integrado.
Función de emisión de señal STEPOUT
Si una desviación entre la posición de comando del excitador y el valor del contador del codificador alcanza el valor configurado (anomalía por desviación), se emite una señal STEPOUT. Esto permite la detección de errores de posición causados por cambios repentinos en la carga, etc.
Función de emisión de alarmas*
Si se produce una anomalía por desviación, se genera una alarma de desbordamiento, y el motor se detiene.
Función de emisión de advertencia*
Si se produce una anomalía por desviación, se genera una advertencia de desbordamiento. El motor continuará operando
*Utilizando los parámetros puede configurarse la emisión de una alarma o una advertencia cuando se produzca la desviación.
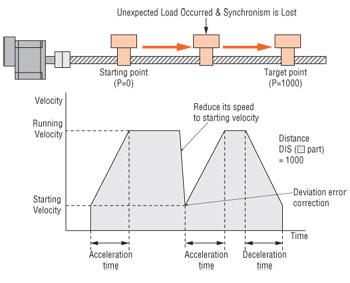
Función de autocorrección
Cuando la función de autocorrección está activada y se pierde sincronía, el controlador se asegura de que el perfil de movimiento se complete correctamente. La distancia total permanece igual.
Motores paso a paso bipolares de 5 fases serie PKP

Los motores paso a paso de alto par de la serie PK/PKP ofrecen un desempeño equilibrado, reforzado por el alto par, y los bajos niveles de vibración y ruido.
- 0.72° (500 pulsos/rev) y 0.36° (1000 pulsos/rev)
- Amplio rango de engranajes para igualación de inercia y más alto par
- Devanado New Pentagon
- Codificadores - 500 o 1000 líneas de resolución
- Con freno electromagnético
- Excitadores paso a paso de 5 fases disponibles
Puertas de enlace de red

El protocolo de comunicación del controlador maestro, la red de Automatización Industrial (FA, Factory Automation), es convertida al protocolo de comunicación RS-485 de Oriental Motor. La conexión de los productos de Oriental Motor compatibles con la red se efectúa mediante un cable de comunicación RS-485.
- Redes compatible:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
*Para uso con excitadores con almacenamiento de datos (red).
![]()
![]()
![]()
Control Options - Opciones de control - Módulo de control

Es posible establecer y cambiar la configuración de los parámetros del excitador interno y la configuración de datos. También pueden usarse para monitoreo de velocidad y de E/S, programación, etc.
*Para uso con excitadores con almacenamiento de datos (red).
Opciones de control - Software de configuración de datos

Este cable de comunicación es necesario para conectarse al computador en el que está instalado el software de configuración de datos.
*Para uso con excitadores con almacenamiento de datos (red).
Cable de comunicación RS-485

Estos cables se utilizan para conectar controladores cuando se está utilizando un tipo de controlador integrado de una manera multi-caída.
Configuración del sistema